Sie sind nicht angemeldet.

 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben  Woran ich sonst so bastele...
Woran ich sonst so bastele... 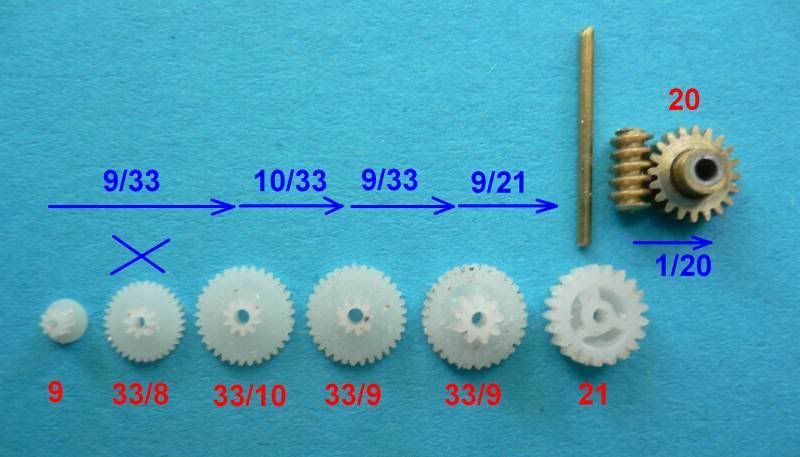 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Fazit:
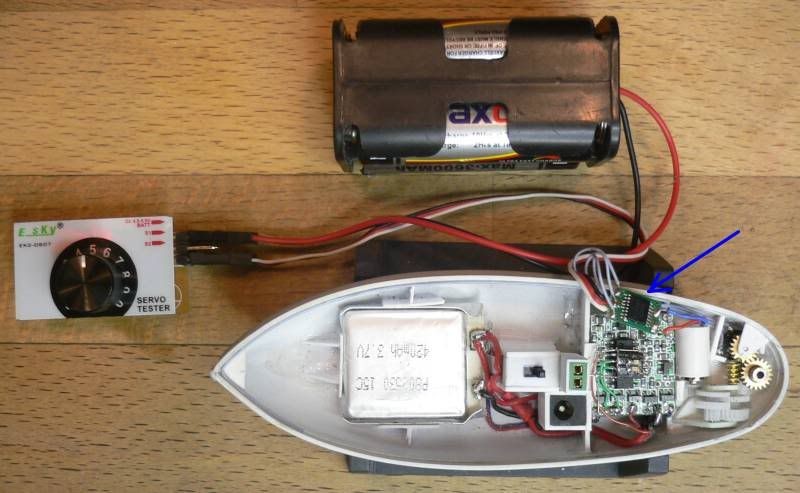
b) Stimmt die Tempoangabe des Servos, so wäre die Ruderbewegung mit 1 Sekunde für Vollausschlag (also 60°) akzeptabel - stimmt sie nicht, dann: Houston - wir haben ein Problem!
 mach doch einfach mal einen Punkt .
mach doch einfach mal einen Punkt .
 . . . so viel Zeit ist das doch gar nicht ...
. . . so viel Zeit ist das doch gar nicht ... 


 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 
 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...  Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
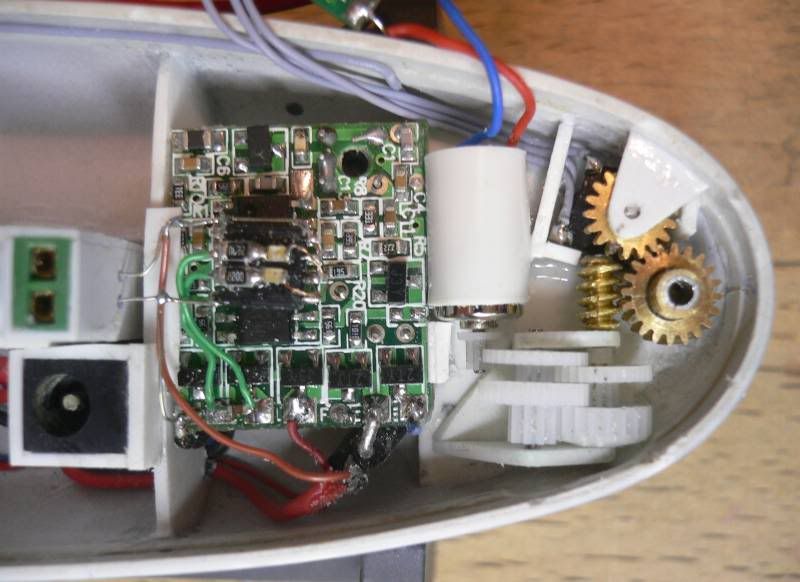
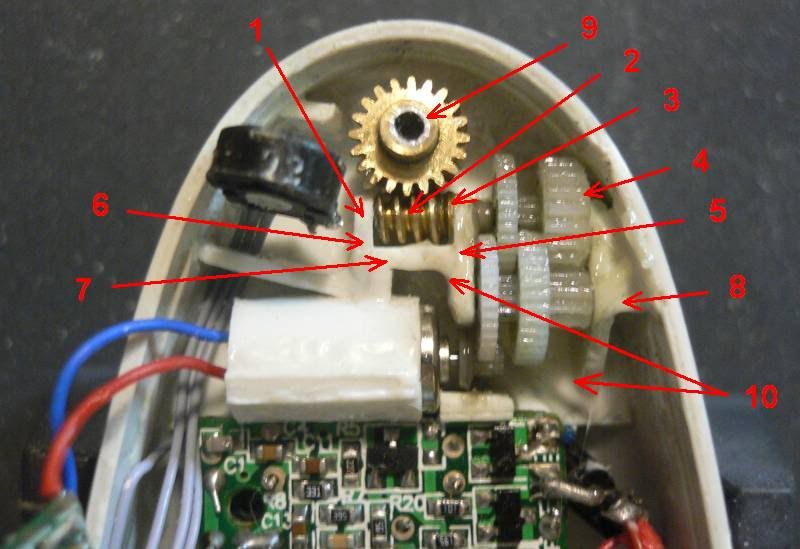
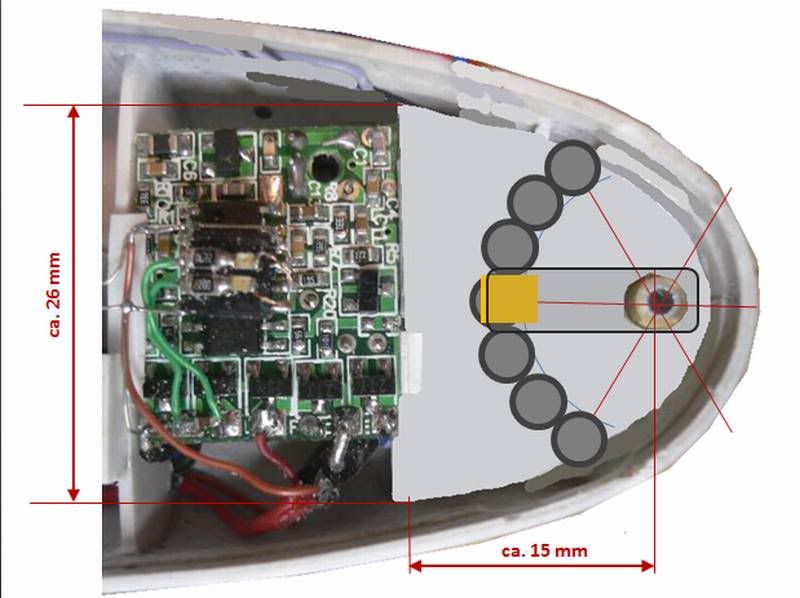
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Das Konzept mit Getriebe + Schnecke + Ruderachs-Positionserfassung funktioniert voll und ganz im Prinzip. Ich habe alle Teile ordentlich unterbringen können. Die Regelung läuft.
Was nicht funktioniert, ist die Zuverlässigkeit.


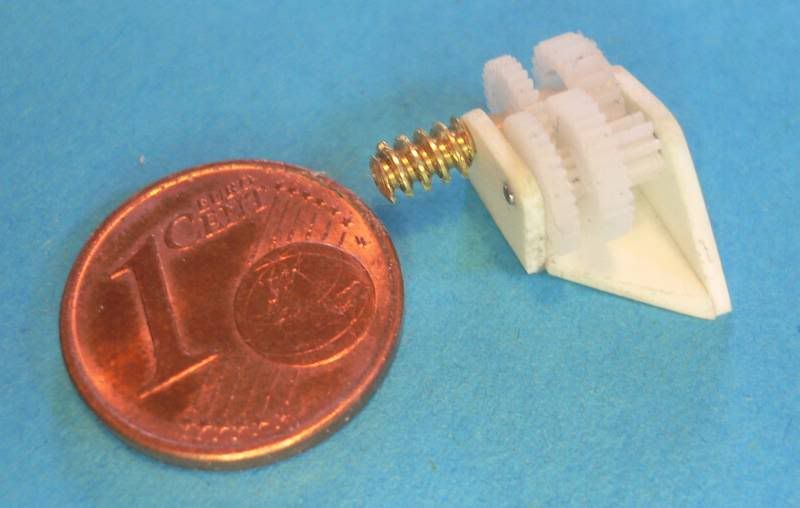
Ein selbstgebautes derart filigranes Bauteil ist nun mal leider niemals 100%
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...  Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 
 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 
1 Besucher
Forensoftware: Burning Board®, entwickelt von WoltLab® GmbH
